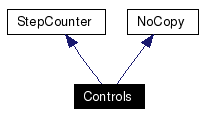
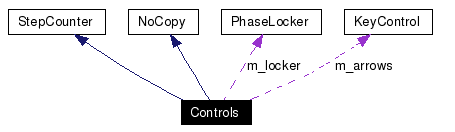
Definition at line 22 of file Controls.h.
Public Member Functions | |
| Controls (PhaseLocker *locker) | |
| Create list of drivers. | |
| ~Controls () | |
| Delete drivers. | |
| void | addUnit (Unit *unit) |
| Add unit under our control. | |
| const Unit * | getActive () |
| Returns active unit or NULL. | |
| bool | driving (const InputProvider *input) |
| Let drivers to drive. | |
| void | lockPhases () |
| void | checkActive () |
| Check whether active unit can still drive, otherwise make switch. | |
| void | switchActive () |
| Switch active unit. | |
| bool | makeMove (char move) |
| Make this move. | |
| bool | cannotMove () const |
| Returns true when there is no unit which will be able to move. | |
| void | controlEvent (const KeyStroke &stroke) |
| Obtain first control symbol from keyboard events. | |
| bool | activateSelected (const Cube *occupant) |
| Activate fish under cursor. | |
| virtual int | getStepCount () const |
| virtual std::string | getMoves () const |
| virtual bool | isPowerful () const |
| Returns true when active fish is powerful. | |
|
|
Create list of drivers.
Definition at line 22 of file Controls.cpp. 00023 : m_units(), m_moves()
00024 {
00025 m_locker = locker;
00026 m_active = m_units.begin();
00027 m_speedup = 0;
00028 m_switch = true;
00029 m_strokeSymbol = ControlSym::SYM_NONE;
00030 }
|
|
|
Delete drivers.
Definition at line 35 of file Controls.cpp. 00036 {
00037 t_units::iterator end = m_units.end();
00038 for (t_units::iterator i = m_units.begin(); i != end; ++i) {
00039 delete (*i);
00040 }
00041 }
|
|
|
Activate fish under cursor.
Definition at line 271 of file Controls.cpp. 00272 {
00273 t_units::iterator end = m_units.end();
00274 for (t_units::iterator i = m_units.begin(); i != end; ++i) {
00275 if ((*i)->equalsModel(occupant)) {
00276 m_active = i;
00277 m_switch = true;
00278 return true;
00279 }
00280 }
00281 return false;
00282 }
|
|
|
Add unit under our control.
Definition at line 48 of file Controls.cpp. 00049 {
00050 m_units.push_back(unit);
00051 //NOTE: insertion invalidates m_active
00052 t_units::iterator end = m_units.end();
00053 for (t_units::iterator i = m_units.begin(); i != end; ++i) {
00054 if ((*i)->startActive()) {
00055 setActive(i);
00056 return;
00057 }
00058 }
00059 setActive(m_units.begin());
00060 }
|
|
|
Returns true when there is no unit which will be able to move.
Definition at line 319 of file Controls.cpp. 00320 {
00321 t_units::const_iterator end = m_units.end();
00322 for (t_units::const_iterator i = m_units.begin(); i != end; ++i) {
00323 if ((*i)->willMove()) {
00324 return false;
00325 }
00326 }
00327 return true;
00328 }
|
|
|
Check whether active unit can still drive, otherwise make switch.
Definition at line 207 of file Controls.cpp. 00208 {
00209 if (m_active == m_units.end() || !(*m_active)->canDrive()) {
00210 switchActive();
00211 }
00212 }
|
|
|
Obtain first control symbol from keyboard events.
Definition at line 244 of file Controls.cpp. 00245 {
00246 SDLKey key = stroke.getKey();
00247
00248 if (m_strokeSymbol == ControlSym::SYM_NONE) {
00249 if (m_active != m_units.end()) {
00250 m_strokeSymbol = (*m_active)->mySymbolBorrowed(key, m_arrows);
00251 }
00252
00253 if (m_strokeSymbol == ControlSym::SYM_NONE) {
00254 t_units::iterator end = m_units.end();
00255 for (t_units::iterator i = m_units.begin(); i != end; ++i) {
00256 m_strokeSymbol = (*i)->mySymbol(key);
00257 if (m_strokeSymbol != ControlSym::SYM_NONE) {
00258 return;
00259 }
00260 }
00261 }
00262 }
00263 }
|
|
|
Let drivers to drive. Only one driver can drive at the same time.
Definition at line 82 of file Controls.cpp. 00083 {
00084 bool moved = false;
00085 if (!useSwitch()) {
00086 if (!useStroke()) {
00087 moved = driveUnit(input);
00088 }
00089 else {
00090 moved = true;
00091 }
00092 }
00093 return moved;
00094 }
|
|
|
Returns active unit or NULL.
Definition at line 66 of file Controls.cpp. 00067 {
00068 Unit *result = NULL;
00069 if (m_active != m_units.end()) {
00070 result = *m_active;
00071 }
00072 return result;
00073 }
|
|
|
Implements StepCounter. Definition at line 57 of file Controls.h. 00057 { return m_moves; }
|
|
|
Implements StepCounter. Definition at line 56 of file Controls.h. 00056 { return m_moves.size(); }
|
|
|
Returns true when active fish is powerful.
Implements StepCounter. Definition at line 334 of file Controls.cpp. 00335 {
00336 bool result = false;
00337 if (m_active != m_units.end()) {
00338 result = (*m_active)->isPowerful();
00339 }
00340 return result;
00341 }
|
|
|
Definition at line 161 of file Controls.cpp. 00162 {
00163 if (m_active != m_units.end() && (*m_active)->isMoving()) {
00164 if ((*m_active)->isPushing()) {
00165 m_speedup = 0;
00166 }
00167 else if (!(*m_active)->isTurning()) {
00168 m_speedup++;
00169 }
00170
00171 m_locker->ensurePhases(getNeededPhases(m_speedup));
00172 }
00173 else {
00174 m_speedup = 0;
00175 }
00176 }
|
|
|
Make this move.
Definition at line 302 of file Controls.cpp. 00303 {
00304 t_units::iterator end = m_units.end();
00305 for (t_units::iterator i = m_units.begin(); i != end; ++i) {
00306 if ((*i)->driveOrder(move) == move) {
00307 setActive(i);
00308 m_moves.push_back(move);
00309 return true;
00310 }
00311 }
00312 return false;
00313 }
|
|
|
Switch active unit. Activate next driveable unit. Definition at line 219 of file Controls.cpp. 00220 {
00221 if (!m_units.empty()) {
00222 t_units::iterator start = m_active;
00223
00224 do {
00225 if (m_active == m_units.end() || m_active + 1 == m_units.end()) {
00226 m_active = m_units.begin();
00227 }
00228 else {
00229 ++m_active;
00230 }
00231 } while (m_active != start && !(*m_active)->canDrive());
00232
00233 if (start != m_active) {
00234 m_speedup = 0;
00235 m_switch = true;
00236 }
00237 }
00238 }
|
 1.4.2
1.4.2